
viDoc RTK rover for PIX4Dcatch
Capture
Couple the viDoc RTK rover to PIX4Dcatch via Bluetooth and connect to any NTRIP service of your choice.
Walk around your area of interest to acquire high-precision positional data for individual images.
Upload
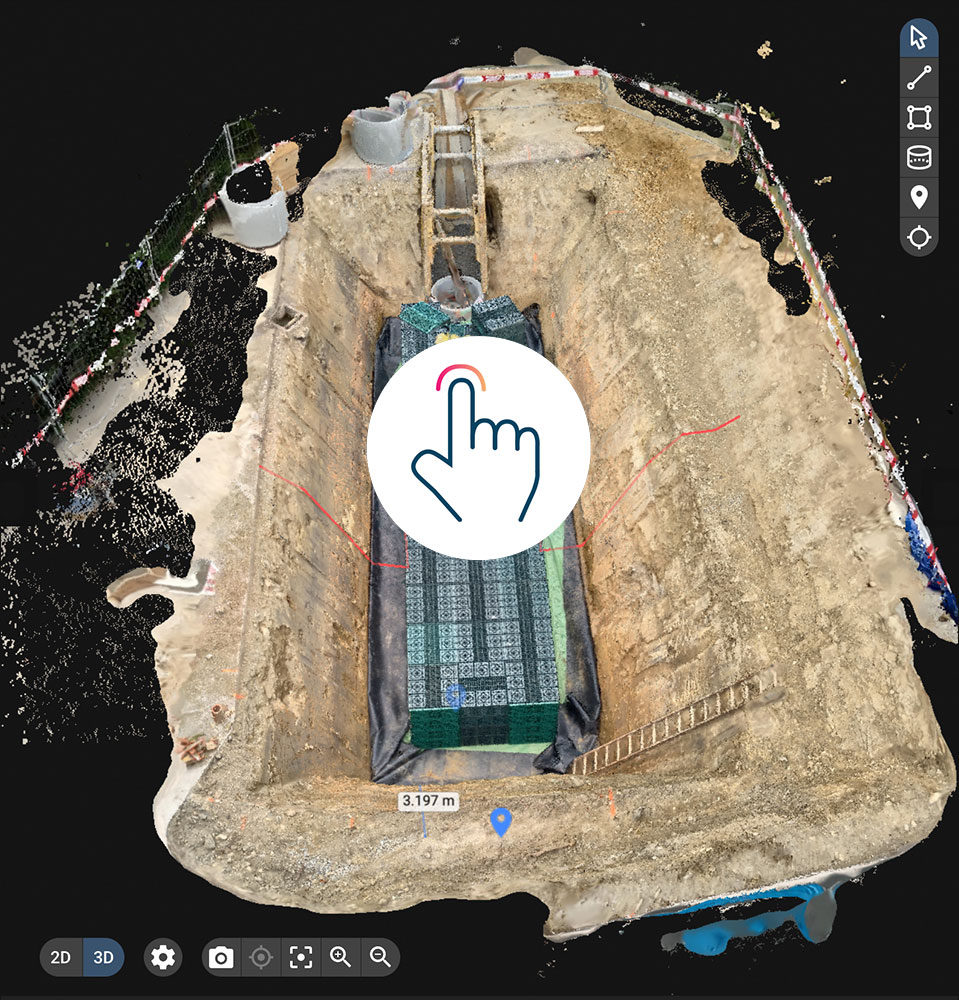
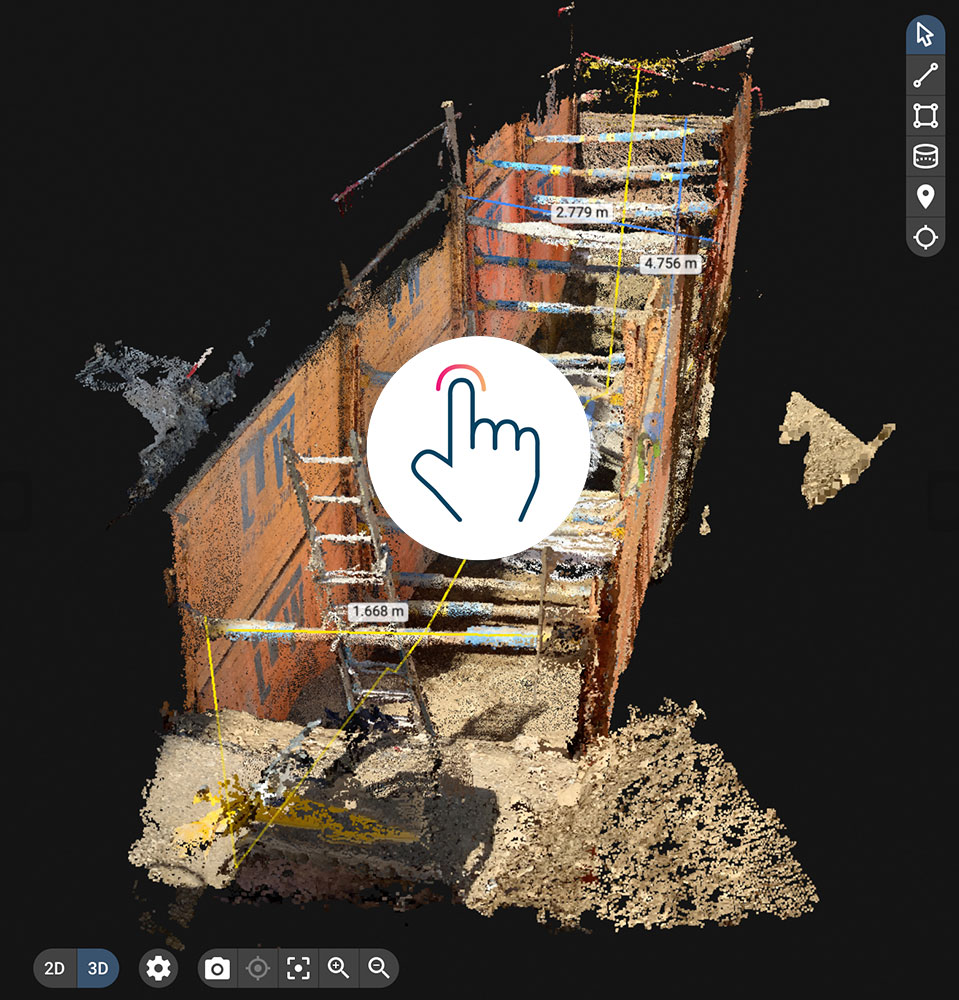
Examine
Share

German-made
Conceived by vigram GmbH., a German company led by professional surveyors.

RTK positioning rover for 3D scanning
The viDoc RTK rover, synchronized with PIX4Dcatch, geotags the images of the 3D scan in real-time, while connected to any NTRIP service.

Enhanced performance
The viDoc RTK rover supports 600 channels including all major constellations (GPS, GLONASS, Galileo and BeiDou) resulting in convergence within 5 seconds. This portable solution comes with powerful lithium polymer batteries to provide continuous usage.
FAQ.
The viDoc RTK rover is a device that can be mounted onto Apple iPad Pro, iPhone 12 Pro and iPhone 12 Pro Max products. The rover, synchronized with Pix4Dcatch, geotags images with RTK accuracy in real-time, while connected to any NTRIP service, allowing absolute accuracy in 3D photogrammetric scanning.
Extensive research has revealed that it is possible to achieve 3D models with an absolute geolocation accuracy of less than 5 cm. More information in the white paper.
Conceived by viGram GmbH., a German company led by professional surveyors, the viDoc RTK rover is designed with an eye for accuracy and works with Pix4Dcatch for image acquisition. The hand-held RTK rover is a replacement for more expensive ground surveying equipment that does not compromise on accuracy to achieve 3D, actionable results.
Basic requirements:
- Pix4Dcatch iOS app on the iPhone or iPad.
- viDoc RTK rover.
- NTRIP service subscription.
- Internet access.
- Pix4Dmapper or Pix4Dcloud (Advanced) license for processing.
Once the latest iOS version of Pix4Dcatch is installed, select the viDoc RTK via Bluetooth settings.
The image acquisition in Pix4Dcatch is independently done from the recording of the GNSS data from the RTK rover. When the capture is complete and the project is saved, the geolocation information from the rover is tagged to the corresponding images based on the image timestamps. The orientation of the images is computed based on information from the AR tracking. In case part of the GNSS data has low accuracy (for example due to poor satellite visibility), relative AR positioning is used to improve the positions and accuracy.
The orientation of the geotagged images are indirectly computed from the internal IMU (Inertial Measurement Unit) of the mobile device and not from the viDoc RTK rover.
Yes, the offset is automatically taken into account.
Yes, you can select the coordinate system in Pix4Dmapper and get the 3D model or 2D map in a coordinate reference system of your choice or transform the image geolocation in the desired coordinate system with a third-party software.
The heights are always based on the ellipsoid (GRS80) and they cannot be changed directly in Pix4Dcatch.
In order to get the results georeferenced based on the local geoid, you can:
- Use a third-party software and transform the heights from ellipsoid to geoid before importing them into Pix4Dmapper.
- Use the Geoid offset above ellipsoid option in Pix4Dmapper.
- Use Ground Control Points to apply the shift.
The antenna on the viDoc RTK rover has the best visibility of satellites when it is directly pointing upwards (90 degrees). The more the antenna is tilted from the 90 degree position, the lower its accessibility to satellites. Hence, it is recommended to only slightly tilt the device from the ideal 90 degree position to a maximum of 20 degrees.
The images acquired from Pix4Dcatch+viDoc should be precisely synchronized to within 100ms.
Please ensure that the device clock is synchronized. In order to synchronize the clock in your iPhone or iPad:
- Open the Settings app.
- Tap “General”.
- Tap “Date & Time”.
- Verify that “Set Automatically” is toggled to the right and appears green.
No, you need an internet connection during data capture to stay connected to the NTRIP service.
An internet connection is also needed every time Pix4Dcatch is started for logging into the app, and to upload the data to Pix4Dcloud for generating the 3D model.
The viDoc RTK rover only allows access to an NTRIP service to receive real-time correctional GNSS data. It is not possible to do PPK or to connect to your own base-station
Drone RTK flights, as well as Pix4Dcatch RTK data, can be combined in a single project inside Pix4Dmapper to obtain a 3D model that has the overview and roof data (from drone imagery) as well as the terrestrial details (from Pix4Dcatch mobile phone data).
This workflow requires to merge Projects.
Contact us directly for the purchase of the viDoc RTK rover.
White Paper on viDOC RTK Rover
Please find this white paper on the use of the viDOC RTK rover for iPad. it will help explain some of the features and functions of the viDOC RTK Rover.
Pix4D_viDoc_RTK_rover_Accuracy_WHITE_PAPER
Investigation on the positional
accuracy of 3D models generated by
the Pix4Dcatch app synchronized with
the viDoc® RTK rover for iPad
written by
F. Murgia, A.Mitache, M. Rehak, C. Strecha, B. Vidmar
April 28, 2021
viDoc Technical Data vigram Pix4D in PDF format.
Please find PDF on information about the viDOC RTK Rover. If you have anby questions by all means do get in touch and we can put you on to one of our sales team that have experience on the PIX4D Products. In the mean time have a read of the white paper and the viDoc Technical Data vigram Pix4D.pdf